|
Yihe Tang Hi, I'm Yihe. I am a first year Ph.D. student in Computer Science at the University of Southern California, where I work with Prof. Yue Wang. Previously, I received my M.S. in Computer Science from Stanford, where I'm honored to work with Prof. Jiajun Wu and Prof. Fei-Fei Li as part of the Stanford Vision and Learning Lab. Before joining Stanford, I received my B.S. in Computer Science and Applied Mathematics from UC San Diego, where I worked with Prof.Hao Su. |

|
Research |
|
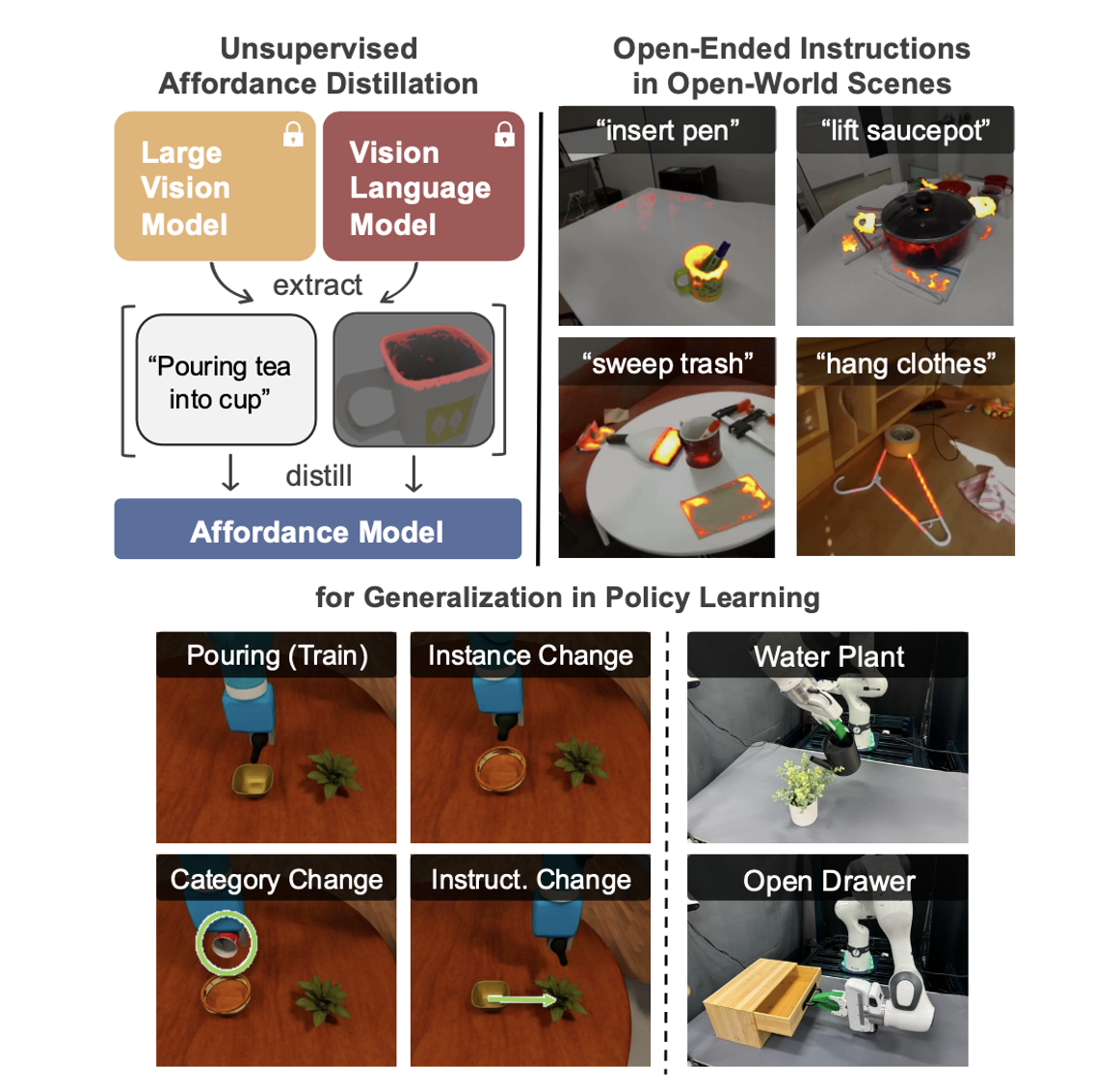
UAD: Unsupervised Affordance Distillation for Generalization in Robotic Manipulation
Yihe Tang, Wenlong Huang, Yingke Wang, Chengshu Li, Roy Yuan, Ruohan Zhang, Jiajun Wu, Li Fei-Fei ICRA, 2025 (Best Paper Award Finalist) project page / paper
|
|
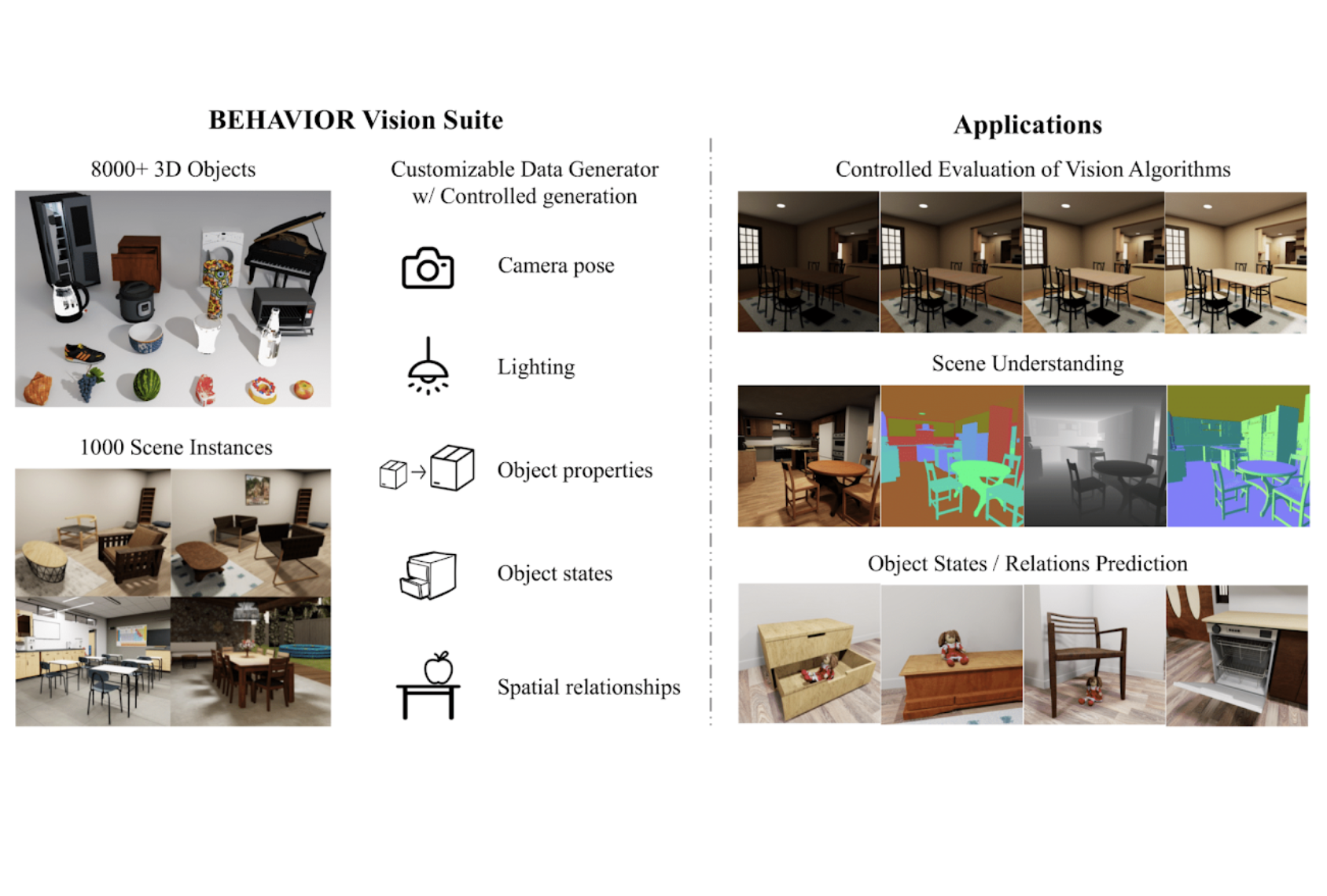
BEHAVIOR Vision Suite: Customizable Dataset Generation via Simulation
Yunhao Ge*, Yihe Tang*, Jiashu Xu*, Cem Gokmen*, Chengshu Li, Wensi Ai, Benjamin Jose Martinez, Arman Aydin, Mona Anvari, Ayush K Chakravarthy, Hong-Xing Yu, Josiah Wong, Sanjana Srivastava, Sharon Lee, Shengxin Zha, Laurent Itti, Yunzhu Li, Roberto Martín-Martín, Miao Liu, Pengchuan Zhang, Ruohan Zhang, Li Fei-Fei, Jiajun Wu CVPR, 2024 (Highlight) project page / arXiv
|
|
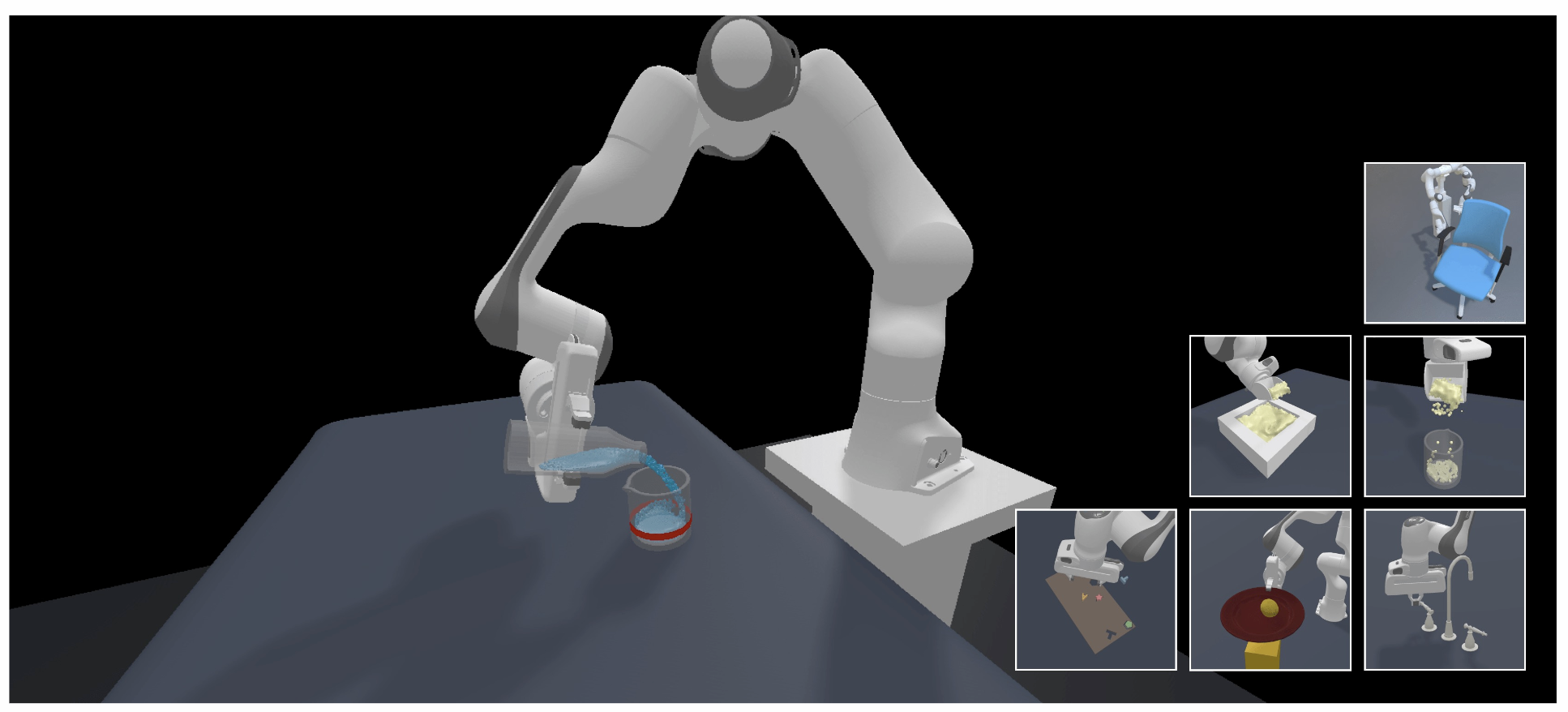
ManiSkill2: A Unified Benchmark for Generalizable Manipulation Skills
Jiayuan Gu†, Fanbo Xiang†, Xuanlin Li*, Zhan Ling*, Xiqiang Liu*, Tongzhou Mu*, Yihe Tang*, Stone Tao*, Xinyue Wei*, Yunchao Yao*, Xiaodi Yuan, Pengwei Xie, Zhiao Huang, Rui Chen, Hao Su ICLR, 2023 project page / arXiv
|
|
Template from Jon Barron's website. |